|
Locus No Pilotus
Project of four first grade MIPT DAFE/RSE students (for engineering practical work in the second semester) in Qt C++
|
|
Locus No Pilotus
Project of four first grade MIPT DAFE/RSE students (for engineering practical work in the second semester) in Qt C++
|
Фигура траектории облёта объектов на полотне More...
#include <trajectory.h>
Public Member Functions | |
| Trajectory ()=default | |
| Trajectory (const std::vector< gui::Segment > &segments) | |
| Инициализирует новый экземпляр Trajectory. | |
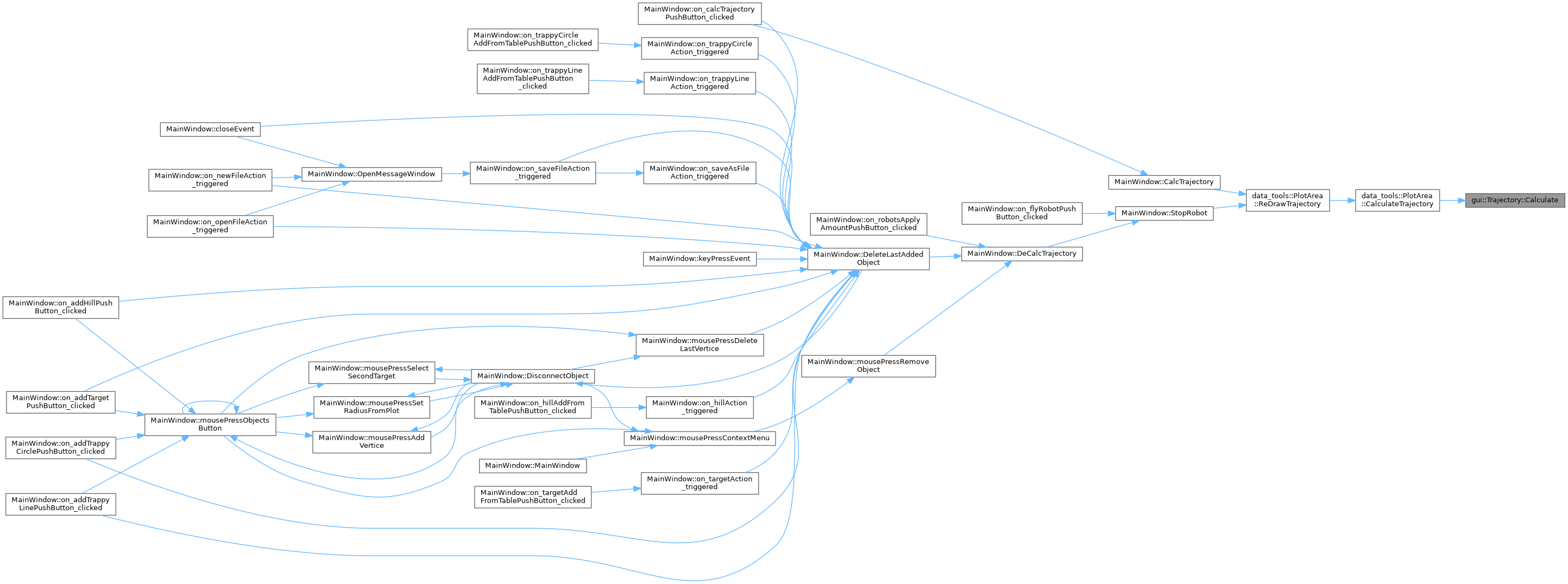
| void | Calculate (const std::vector< lib::Target > &targets, const std::vector< lib::Hill > &hills, const std::vector< lib::TrappyCircle > &tr_circles, const std::vector< lib::TrappyLine > &tr_lines, unsigned short amount_of_robots) |
| Расчет вектора сегментов по заданным объектам на полотне | |
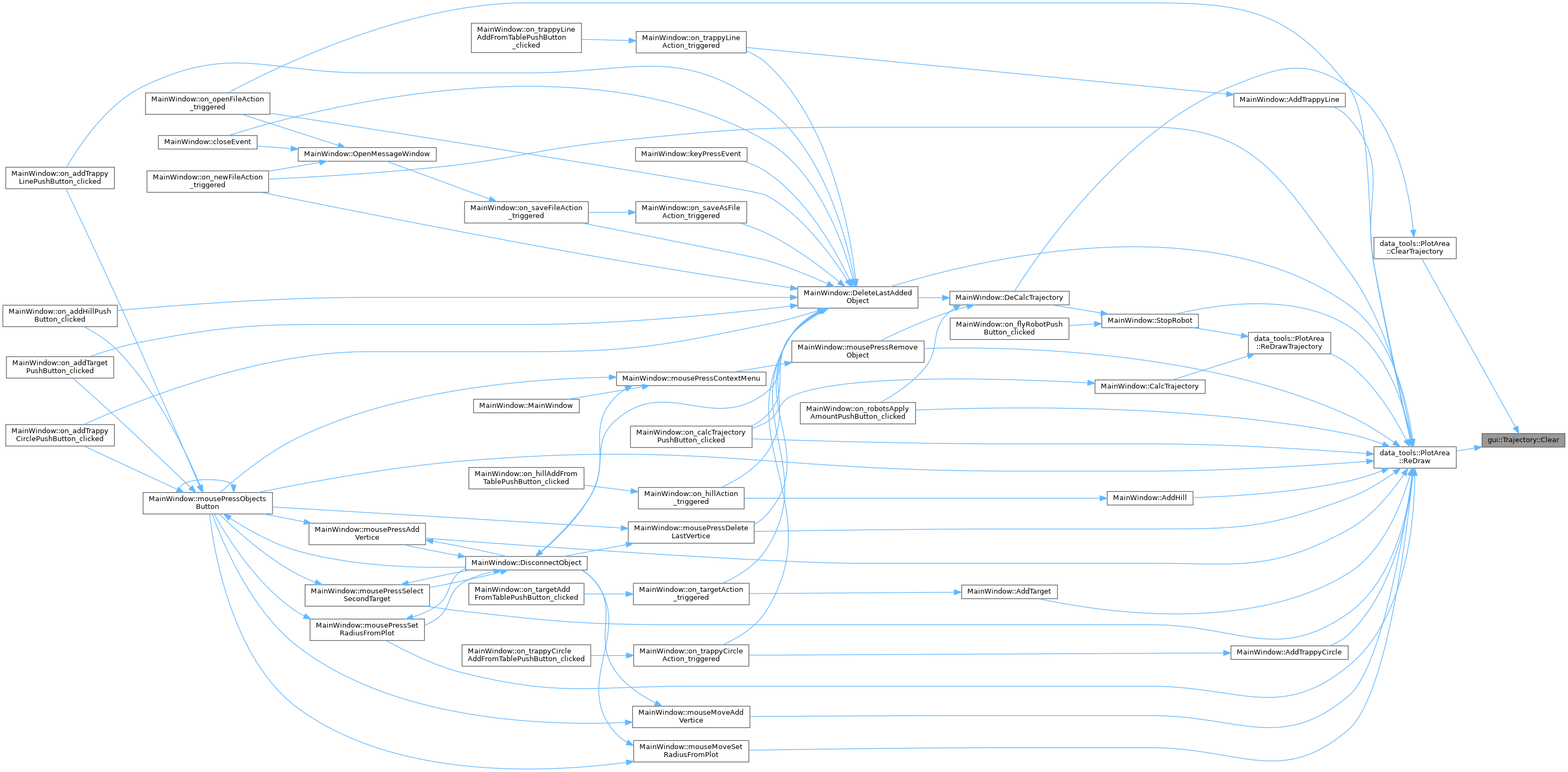
| void | Clear () |
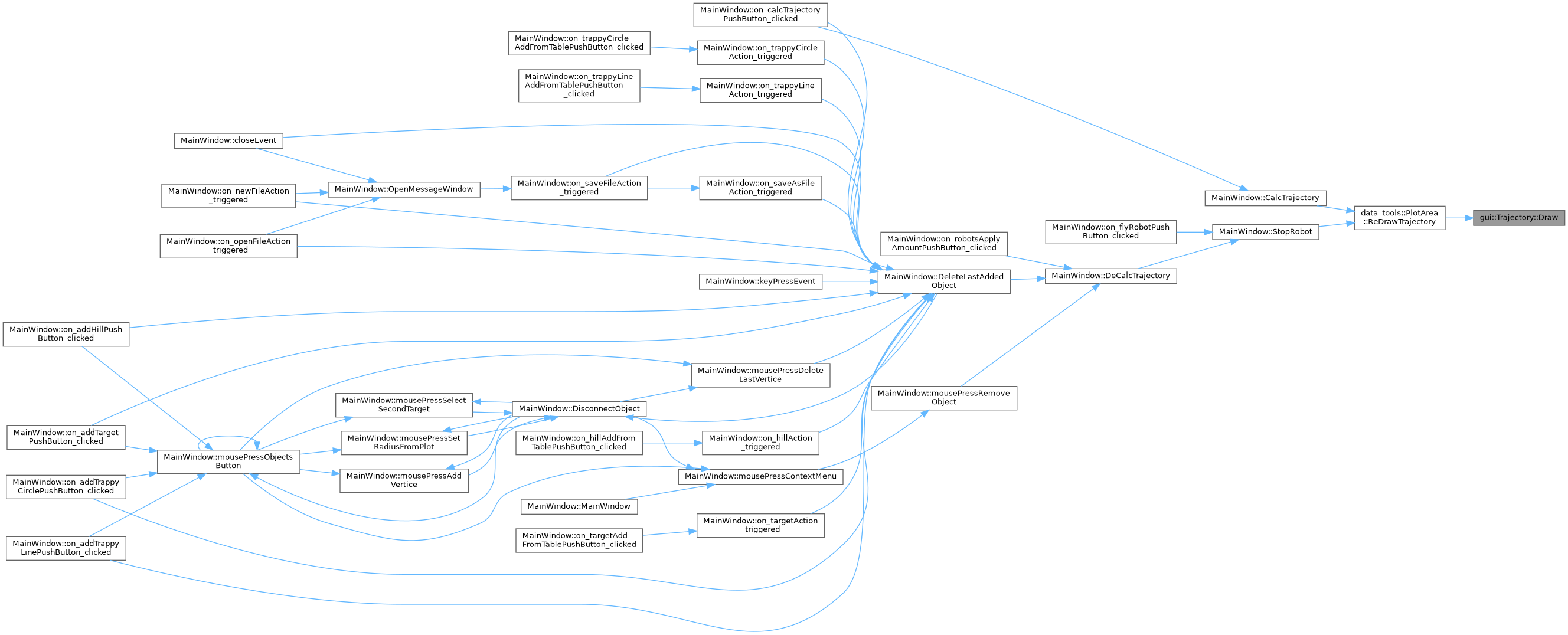
| void | Draw (QCustomPlot *plot) override |
| Отрисовывает фигуру на полотне | |
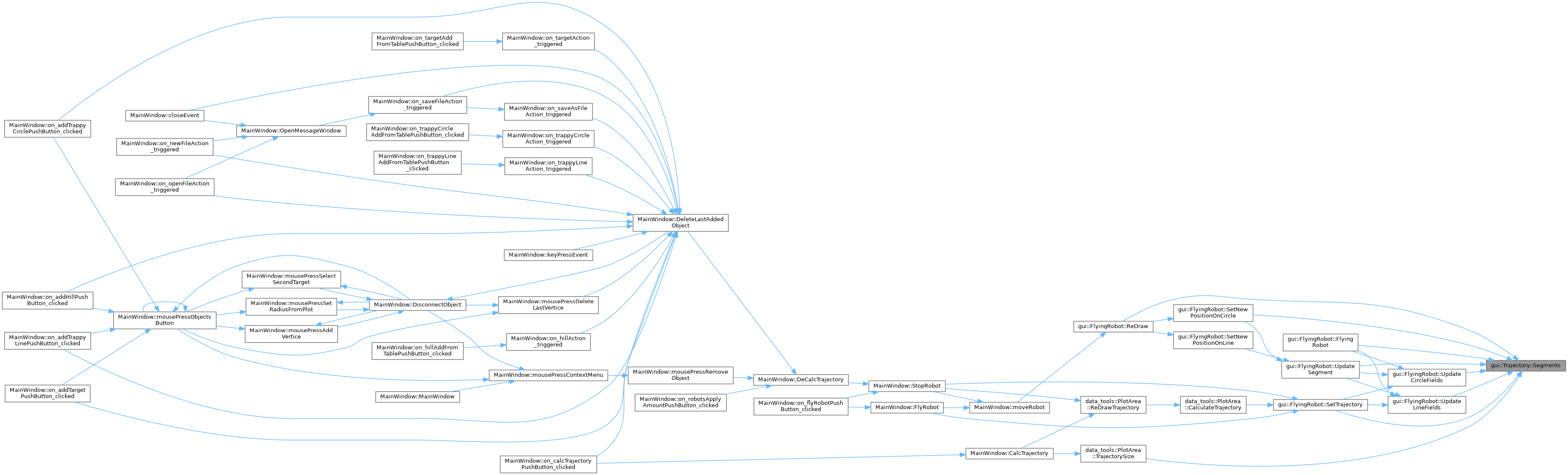
| std::vector< gui::Segment > & | Segments () |
| Возвращает вектор сегментов | |
| const std::vector< gui::Segment > & | Segments () const |
| Возвращает вектор сегментов | |
Private Attributes | |
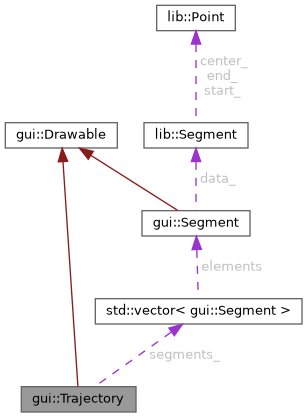
| std::vector< gui::Segment > | segments_ |
Фигура траектории облёта объектов на полотне
Ради этого мы все здесь собрались :)
|
default |
|
inline |
Инициализирует новый экземпляр Trajectory.
| segments | вектор отрезков траектории |
| void gui::Trajectory::Calculate | ( | const std::vector< lib::Target > & | targets, |
| const std::vector< lib::Hill > & | hills, | ||
| const std::vector< lib::TrappyCircle > & | tr_circles, | ||
| const std::vector< lib::TrappyLine > & | tr_lines, | ||
| unsigned short | amount_of_robots ) |
Расчет вектора сегментов по заданным объектам на полотне
| targets | контрольные точки |
| hills | многоугольные препятствия |
| tr_circles | круговые препятствия |
| tr_lines | запрещённые перелеты |
| amount_of_robots | кол-во летающих роботов |

|
inline |
|
overridevirtual |
Отрисовывает фигуру на полотне
| plot | указатель на полотно |
Implements gui::Drawable.
|
inline |
Возвращает вектор сегментов
|
inline |
|
private |