|
Locus No Pilotus
Project of four first grade MIPT DAFE/RSE students (for engineering practical work in the second semester) in Qt C++
|
|
Locus No Pilotus
Project of four first grade MIPT DAFE/RSE students (for engineering practical work in the second semester) in Qt C++
|
Classes | |
| class | AdjacencyMatrix |
| Матрица смежности для алгоритма Литтла More... | |
| class | CircleObstacle |
| Круговое препятствие More... | |
| class | DijkstrasAlgorithm |
| Реализация алгоритма Дейкстры More... | |
| struct | Edge |
| Ребро между двумя контрольными точками More... | |
| struct | LinearFunction |
| Прямая вида ax+by+c=0. More... | |
| struct | Minimums |
| Структура для хранения двух минимумов строки/столбца More... | |
| class | OptimalWayCalculator |
| Функтор, находящий кратчайший путь между точками More... | |
| struct | PathWayGraph |
| Граф вершин между контрольными точками More... | |
| struct | PathWayNode |
| Вершина графа More... | |
| struct | Point |
| Точка с геометрическими связями More... | |
| class | PolygonObstacle |
| Многоугольное препятствие More... | |
| class | TrajectoryCalculator |
| class | TravellingSalesmansProblem |
| Решение задачи коммивояжера More... | |
| struct | TSPNode |
| Вершина дерева с соответствующей матрицей смежности More... | |
Functions | |
| bool | AreThereIntersections (const CircleObstacle &cr_obst, const LinearFunction &line) |
| Проверяет, пересекает ли прямая многоугольник | |
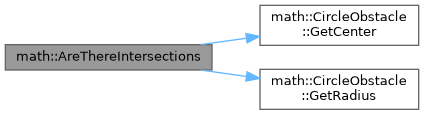
| bool | AreThereIntersections (const CircleObstacle &cr_obst, const Point &pnt1, const Point &pnt2) |
| Проверяет, пересекает ли отрезок, проведенный через две точки, окружность | |
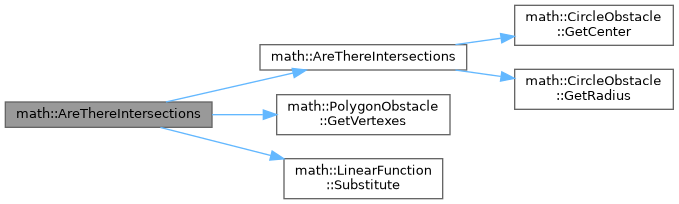
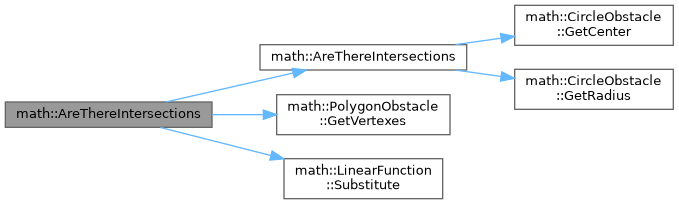
| bool | AreThereIntersections (const PolygonObstacle &poly_obst, const LinearFunction &line) |
| Проверяет, пересекает ли прямая многоугольник | |
| bool | AreThereIntersections (const PolygonObstacle &poly_obst, const Point &pnt1, const Point &pnt2) |
| Проверяет, пересекает ли отрезок, проведенный через две точки, многоугольник | |
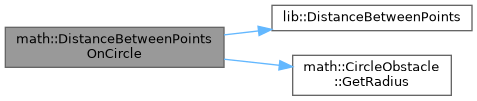
| double | DistanceBetweenPointsOnCircle (const CircleObstacle &circle, const Point &p1, const Point &p2) |
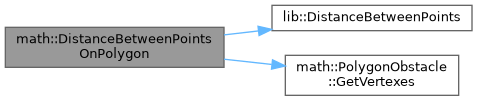
| double | DistanceBetweenPointsOnPolygon (const PolygonObstacle &polygon, const Point &p1, const Point &p2) |
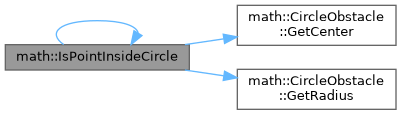
| bool | IsPointInsideCircle (const Point &point, const CircleObstacle &circle) |
| Проверяет, находится ли точка внутри окружности | |
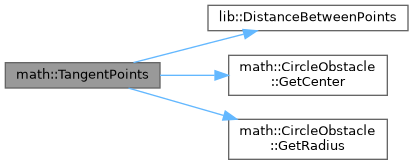
| std::pair< Point, Point > | TangentPoints (const CircleObstacle &cr_obst, const Point &point) |
| Находит точки касания круга c касательной, проведенной из контрольной точки | |
| std::pair< Point, Point > | TangentPoints (const LinearFunction &tangent, const CircleObstacle &circle1, const CircleObstacle &circle2) |
| Находит точки касания кругов с их общей касательной | |
| std::pair< Point, Point > | TangentPoints (const LinearFunction &tangent, const PolygonObstacle &polygon, const CircleObstacle &circle) |
| Находит точки касания многоугольника и круга с их общей касательной | |
| std::pair< Point, Point > | TangentPoints (const LinearFunction &tangent, const PolygonObstacle &polygon1, const PolygonObstacle &polygon2) |
| Находит точки касания двух многоугольников с их общей касательной | |
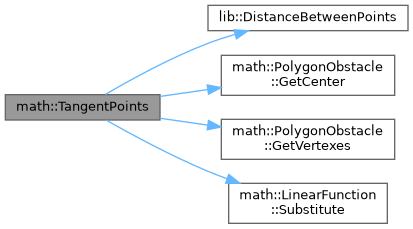
| std::pair< Point, Point > | TangentPoints (const PolygonObstacle &poly_obst, const Point &point) |
| Находит точки касания многоугольника c касательной, проведенной из контрольной точки | |
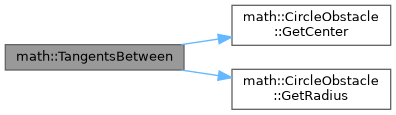
| std::vector< LinearFunction > | TangentsBetween (const CircleObstacle &circle1, const CircleObstacle &circle2) |
| Находит уравнения общих касательных двух кругов | |
| template<typename T > | |
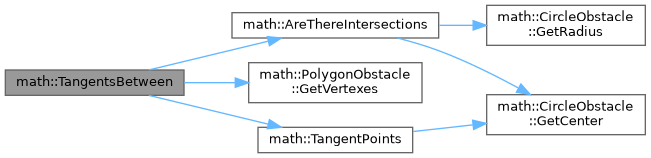
| std::vector< LinearFunction > | TangentsBetween (const PolygonObstacle &polygon, const T &obstacle) |
| Находит уравнения общих касательных многоугольника и другого препятствия | |
| template std::vector< LinearFunction > | TangentsBetween< CircleObstacle > (const PolygonObstacle &polygon, const CircleObstacle &obstacle) |
| template std::vector< LinearFunction > | TangentsBetween< PolygonObstacle > (const PolygonObstacle &polygon, const PolygonObstacle &obstacle) |
| bool math::AreThereIntersections | ( | const CircleObstacle & | cr_obst, |
| const LinearFunction & | line ) |
Проверяет, пересекает ли прямая многоугольник
| cr_obst | круг |
| line | прямая |

| bool math::AreThereIntersections | ( | const CircleObstacle & | cr_obst, |
| const Point & | pnt1, | ||
| const Point & | pnt2 ) |
Проверяет, пересекает ли отрезок, проведенный через две точки, окружность
| cr_obst | круг |
| pnt1 | точка 1 |
| pnt2 | точка 2 |
| bool math::AreThereIntersections | ( | const PolygonObstacle & | poly_obst, |
| const LinearFunction & | line ) |
Проверяет, пересекает ли прямая многоугольник
| poly_obst | многоугольник |
| line | прямая |
| bool math::AreThereIntersections | ( | const PolygonObstacle & | poly_obst, |
| const Point & | pnt1, | ||
| const Point & | pnt2 ) |
Проверяет, пересекает ли отрезок, проведенный через две точки, многоугольник
| poly_obst | многоугольник |
| pnt1 | точка 1 |
| pnt2 | точка 2 |
| double math::DistanceBetweenPointsOnCircle | ( | const CircleObstacle & | circle, |
| const Point & | p1, | ||
| const Point & | p2 ) |

| double math::DistanceBetweenPointsOnPolygon | ( | const PolygonObstacle & | polygon, |
| const Point & | p1, | ||
| const Point & | p2 ) |
| bool math::IsPointInsideCircle | ( | const Point & | point, |
| const CircleObstacle & | circle ) |
Проверяет, находится ли точка внутри окружности
| point | точка |
| circle | окружность |

| std::pair< Point, Point > math::TangentPoints | ( | const CircleObstacle & | cr_obst, |
| const Point & | point ) |
Находит точки касания круга c касательной, проведенной из контрольной точки
| cr_obst | круг |
| point | контрольная точка |
| std::pair< Point, Point > math::TangentPoints | ( | const LinearFunction & | tangent, |
| const CircleObstacle & | circle1, | ||
| const CircleObstacle & | circle2 ) |
Находит точки касания кругов с их общей касательной
| tangent | касательная |
| circle1 | круг 1 |
| circle2 | круг 2 |


| std::pair< Point, Point > math::TangentPoints | ( | const LinearFunction & | tangent, |
| const PolygonObstacle & | polygon, | ||
| const CircleObstacle & | circle ) |
Находит точки касания многоугольника и круга с их общей касательной
| tangent | касательная |
| polygon | многоугольник |
| circle | круг |

| std::pair< Point, Point > math::TangentPoints | ( | const LinearFunction & | tangent, |
| const PolygonObstacle & | polygon1, | ||
| const PolygonObstacle & | polygon2 ) |
Находит точки касания двух многоугольников с их общей касательной
| tangent | касательная |
| polygon1 | многоугольник 1 |
| polygon2 | многоугольник 2 |

| std::pair< Point, Point > math::TangentPoints | ( | const PolygonObstacle & | poly_obst, |
| const Point & | point ) |
Находит точки касания многоугольника c касательной, проведенной из контрольной точки
| poly_obst | многоугольник |
| point | контрольная точка |
| std::vector< LinearFunction > math::TangentsBetween | ( | const CircleObstacle & | circle1, |
| const CircleObstacle & | circle2 ) |
Находит уравнения общих касательных двух кругов
| circle1 | круг 1 |
| circle2 | круг 2 |

| std::vector< LinearFunction > math::TangentsBetween | ( | const PolygonObstacle & | polygon, |
| const T & | obstacle ) |
Находит уравнения общих касательных многоугольника и другого препятствия
| polygon | многоугольник |
| obstacle | препятствие |
| template std::vector< LinearFunction > math::TangentsBetween< CircleObstacle > | ( | const PolygonObstacle & | polygon, |
| const CircleObstacle & | obstacle ) |
| template std::vector< LinearFunction > math::TangentsBetween< PolygonObstacle > | ( | const PolygonObstacle & | polygon, |
| const PolygonObstacle & | obstacle ) |