|
Locus No Pilotus
Project of four first grade MIPT DAFE/RSE students (for engineering practical work in the second semester) in Qt C++
|
|
Locus No Pilotus
Project of four first grade MIPT DAFE/RSE students (for engineering practical work in the second semester) in Qt C++
|
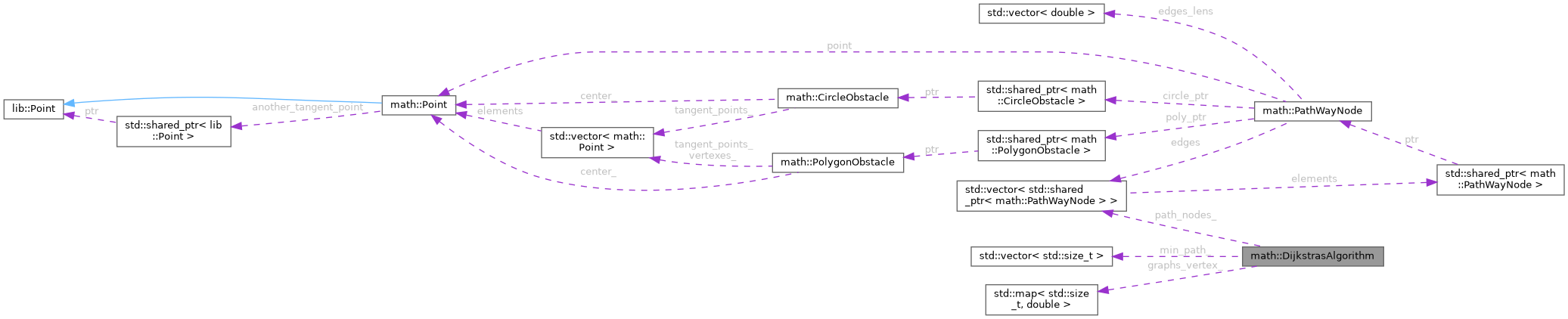
Реализация алгоритма Дейкстры More...
#include <path_graph.h>
Public Member Functions | |
| DijkstrasAlgorithm (PathWayGraph graph) | |
| Инициализирует новый экземпляр Dijkstras_algorithm. | |
| double | Get_Min_Len () const |
| std::vector< std::size_t > | Get_Min_Path () const |
Private Member Functions | |
| void | CalculateMinPath_ () |
| Определяет длину кратчайшего пути из start_ в end_. | |
Private Attributes | |
| std::size_t | first_point_ |
| std::map< std::size_t, double > | graphs_vertex_ |
| double | min_length_ |
| std::vector< std::size_t > | min_path_ |
| std::vector< std::shared_ptr< PathWayNode > > | path_nodes_ |
| std::size_t | second_point_ |
Реализация алгоритма Дейкстры
|
inline |
Инициализирует новый экземпляр Dijkstras_algorithm.
| start | начальная точка |
| end | конечная точка |

|
private |
Определяет длину кратчайшего пути из start_ в end_.

|
inline |
|
inline |
|
private |
|
private |
|
private |
|
private |
|
private |
|
private |

